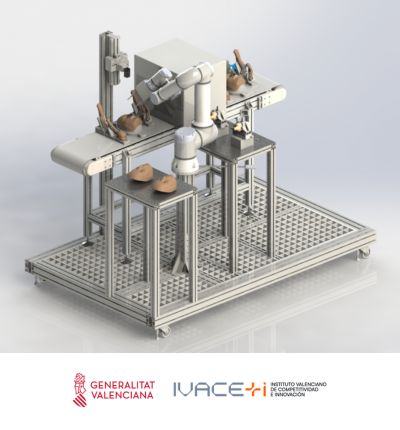
El proyecto R4MID, tiene como objetivo revolucionar la industria mediante tecnologías de vanguardia para la manipulación de objetos deformables. A través de esta iniciativa, se desarrollará un sistema robótico capaz de detectar y localizar de forma precisa piezas deformables, como por ejemplo muñecas, facilitando su agarre y manipulación automatizada. La capacidad de manipular este tipo de objetos representa un desafío significativo en la industria, ya que estos elementos pueden variar en forma y estructura, dificultando su manipulación automatizada. El desarrollo de sistemas robóticos capaces de manipular objetos deformables tiene el potencial de transformar diversos sectores industriales, entre ellos el manufacturero.
Tras desarrollar el demostrador de la célula robótica, actualmente se está trabajando en la detección y localización precisa de piezas deformables que manipulará el sistema robótico desarrollado en el proyecto. Los algoritmos de inteligencia artificial permiten que el sistema pueda identificar rápidamente las piezas deformables manipuladas. Una vez identificadas, mediante técnicas de visión, se pueden reconocer los mejores puntos de agarre de la pieza por el sistema robótico.
En este proyecto, financiado por FEDER, colaboran las empresas INDUSTRIA AUXILIAR JUEMA S.L., THE DOLL FACTORY EUROPE S.L. y VICEDO-MARTI S.L.
+info:
CARLOS MURCIA